
Academics at Zhejiang University in China have published findings exploring the use of invisible marine robotics for non-disruptive underwater tasks.
In the deep sea environment robots are tasked with a range of tasks including the monitoring and maintenance of underwater equipment, aquatic ecological detection, and the salvage of sunken objects and refuse.
While existing rigid robots are instrumental in executing elementary and heavyweight underwater tasks, they are often constrained by limited flexibility and environmental adaptability.
To assess the need for a flexible, non-invasive soft-robotic, the article proposes a transparent reconfigurable underwater soft robot with variable stiffness be deployed.
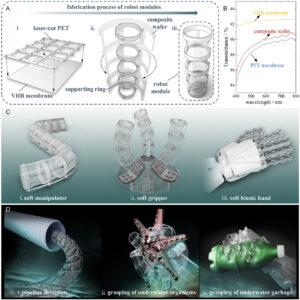
The robot itself is a long, cylindrical tube, whose stiffness can be controlled by the operator, allowing it to contort and flex into a variety of shapes.
Importantly too, it’s hollow, which helps it withstand the crushing pressure of the deep sea.
The team also designed the robot to be modular, meaning it is easily reassembled and supports attachments for gripping and manipulating objects.
Throughout lab testing the robot performed well, navigating through underwater obstacles and precisely plucking objects from the bottom of a tank.
The paper concluded that the results of the kinematic analysis carried out to verify the performance of the robot demonstrated that that the smaller diameter and the larger precompression result in higher stiffness of the robot module.
The paper also suggested that the underwater operation experiments of the soft manipulator and soft gripper showed good environmental adaptability and biological interaction ability.
Professor at Zhejiang University in China and paper co-author Haojian Lu said: “Our robot’s camouflage capability is achieved through the high transparency of its materials.
“This feature allows the robot to become nearly invisible underwater. Due to the hollow structure, water will enter the inside of the robot, and at this time, the pressure inside and outside is the same, and the robot will not be squeezed inward.
“[This allows] for the easy and rapid replacement of any module that is damaged or when we wish to experiment with modules that offer new functionalities.
“Progress is required not only in materials and design but also in sensor technology, control, and autonomous algorithms.”





